嫦娥六号的着陆器与上升器组合体在阿波罗撞击坑预选着陆区着陆后不久,官媒就发布了全程登月实况视频。

实况视频是由嫦娥六号着陆器降落相机拍摄,全程记录了从主减速段到缓冲着陆的登月全过程。在登月任务进行时,嫦娥六号会将降落相机拍摄的画面进行压缩并抽帧通过鹊桥二号中继卫星实时回传地球,供科研人员研判探测器的飞行状态,待抵达月面之后探测器会将更高质量的图像数据回传地球,我们看到的就是后者。
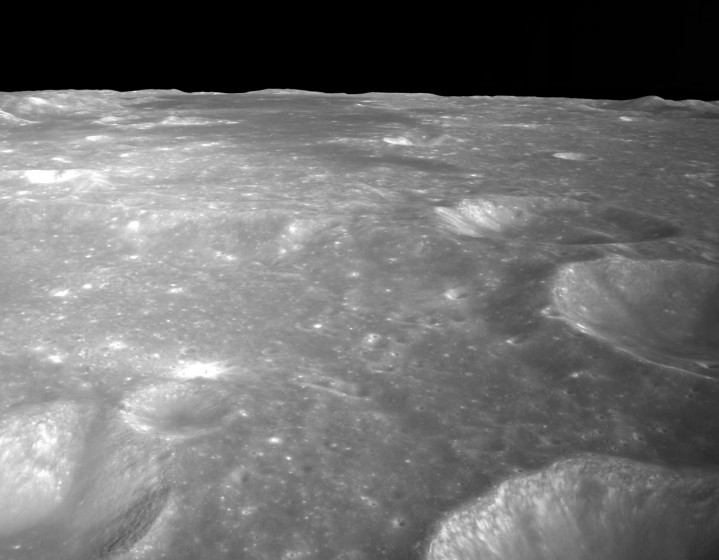
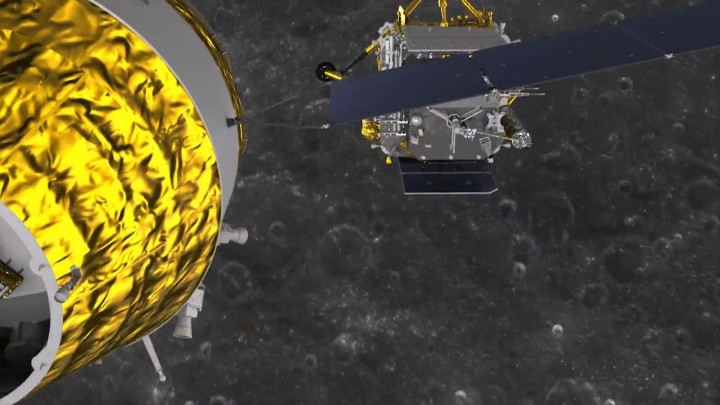
嫦娥六号着陆器与上升器组合体登月下降开始后不久拍摄的月面影像
嫦娥六号登月视频首先映入眼帘的就是月球背面高大的环形山系,用三个词来形容就是,山高、谷陡、坑深。整个视频最吸引我的是最后阶段,探测器在100米高度悬停,并在极短的时间内选定最终安全落点,随后进行斜向机动规避障碍地形,最终在一堆乱石坑中的一块平地上着陆,再次展现出基于机器视觉技术的精确避障实力。
嫦娥六号悬停、避障、缓速下降、着陆缓冲

编外月球车“移动相机”拍摄的嫦娥六号着陆器与上升器组合体
航天博主SegerYU将嫦娥六号降落影像图与高分辨率环月遥感图进行了匹配对比,进而获得了嫦娥六号着陆器与上升器组合体的着陆坐标是南纬41.64°,西经153.99°。
嫦娥六号着陆影像与环月遥感影像匹配对比。图源:SegerYU
也就在前几天,一段央视报道画面中也不经意地披露了嫦娥六号登月的预选着陆点坐标是南纬42.1度、西经154.4°。
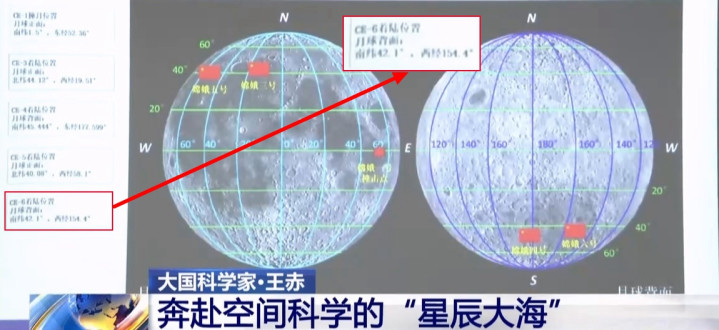
嫦娥六号从地球出发前选定的标称着陆点
也就是说,嫦娥六号落在了预选着陆坐标点的东北方,已知两点坐标解算出来的两点间距离是16.7公里。
接近17公里的距离偏差,这是什么概念?
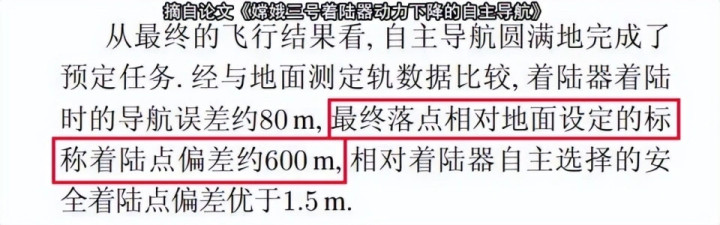
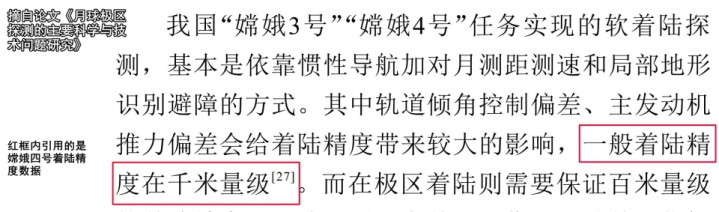
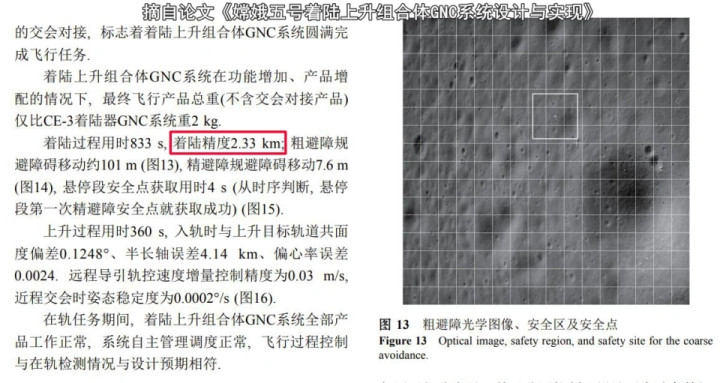
经过一番查询后笔者找到了此前我国三次登月的着陆偏差数据:嫦娥三号偏差约600米,嫦娥四号偏差距离是千米量级,嫦娥五号的偏差是2.33公里。
嫦娥六号的着陆偏差数据是以往任务最优值的27.8倍,是以往任务最低值的7.2倍。
再与国外任务对比:
印度月船三号着陆器的“实际着陆坐标”与“预选标称着陆坐标”的偏差距离:约360米;

印度月船三号着陆器
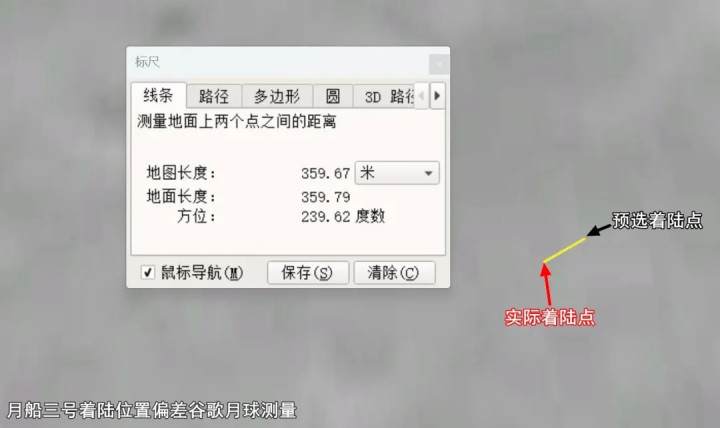
月船三号着陆位置偏差测量
日本SLIM探月智能着陆器的“实际着陆坐标”与“预选标称着陆坐标”的偏差距离:55米。

日本SLIM探月智能着陆器
嫦娥六号与印度月船三号相比,前者的着陆偏差数据是后者的46倍。如此悬殊的着陆偏差数据,正常吗?
嫦娥六号登月位置偏差允许的范围是,经度正负4°,纬度正负2°,其预选着陆区是一个东西狭长南北较窄的长方形区域,最终落点只要在南纬42.1° ± 2° , 西经154.4° ± 4° 范围内即可,而嫦娥六号偏差16.7公里的实际落点坐标刚好就在此范围内。
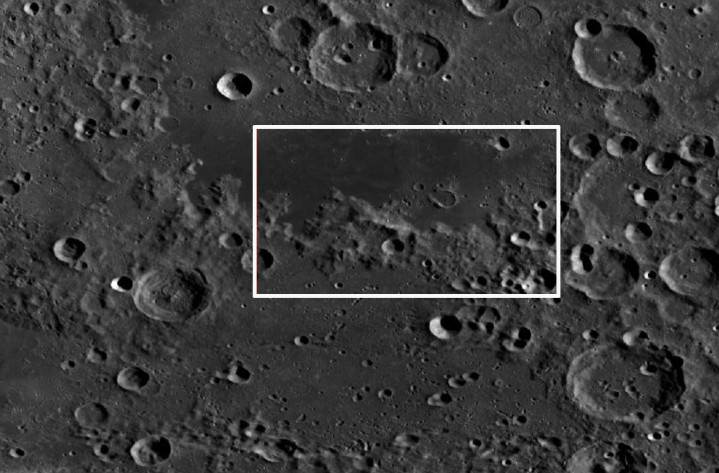
位于阿波罗盆地的嫦娥六号预选着陆区
为什么嫦娥六号的着陆位置偏差比以往更大?
这还得从嫦娥探月工程的“绕、落、回”三步走发展规划说起,嫦娥一号首次突破绕月工程技术,嫦娥二号直接进地月转移轨道,近月制动入轨高度更低,精度更高,进一步巩固绕月工程技术,承担首次登月任务的嫦娥三号拿下了月面软着陆工程技术,登陆月球背面的嫦娥四号是嫦娥三号的备份,产品性能高度一致,执行月球采样返回任务的嫦娥五号的登月部分则是在嫦娥三号基础上发展而来,嫦娥六号又是嫦娥五号的备份。
嫦娥一号绕月
嫦娥三号落月
嫦娥五号采样返回
可以看到,虽然从嫦娥三号到嫦娥六号,时间跨度有十年之久,但是嫦娥六号的登月技术能力与嫦娥三号仍然是一脉相承。随着时间的推移,个别子系统技术指标虽有所提升,但设计架构并未改变。
举个例子,比如嫦娥六号在粗避障阶段配置的依然是与嫦娥三号同款的光学成像敏感器,只是增配了功能完全一致的着陆地形敏感器作为备份,起到的作用是巩固设计可靠性,着陆位置偏差的控制水平依然与嫦娥三号一样。
嫦娥三号又是什么水平?
让我们把时间指针拨回到十年前,在嫦娥三号以前,人类的无人月球着陆探测器均为盲降登月,何为“盲”?指的就是在着陆末段没有眼睛去识别障碍物,只能沿着既定弹道落下去,登月成功率没有保障。
十年前的嫦娥三号开创了基于机器视觉登月的新纪元,彻底终结了人类无人探测器盲降月球的历史,应用了光学粗避障+激光三维成像精避障的接力避障技术,确保了登月成功率,正是在这套技术的加持下,我们才能收获嫦娥三号、嫦娥四号、嫦娥五号、嫦娥六号,四次登月四战四捷的辉煌战绩。

嫦娥三号在距月面100米高度悬停,使用激光三维成像敏感器扫描月面识别障碍,并确定最终安全落点。
从收获的成功次数,与拿到的科学探测数据来看,嫦娥三号的机器视觉避障登月技术无疑是巨大的成功。
但是,要认识到,在不同时期矛盾的主次是不同的,并不是说有了机器视觉避障登月技术就可以一劳永逸。
在探月初期阶段,能否成功登月是主要矛盾,然而随着时间的推移,科学探测的需求也对着陆探测器提出了更高的指标要求。比如,科学家要去月球某一个指定点位附近探测,或者要把这个点位附近的月壤样本带回来,这就要求着陆探测器必须具备“高精度定点着陆能力”。
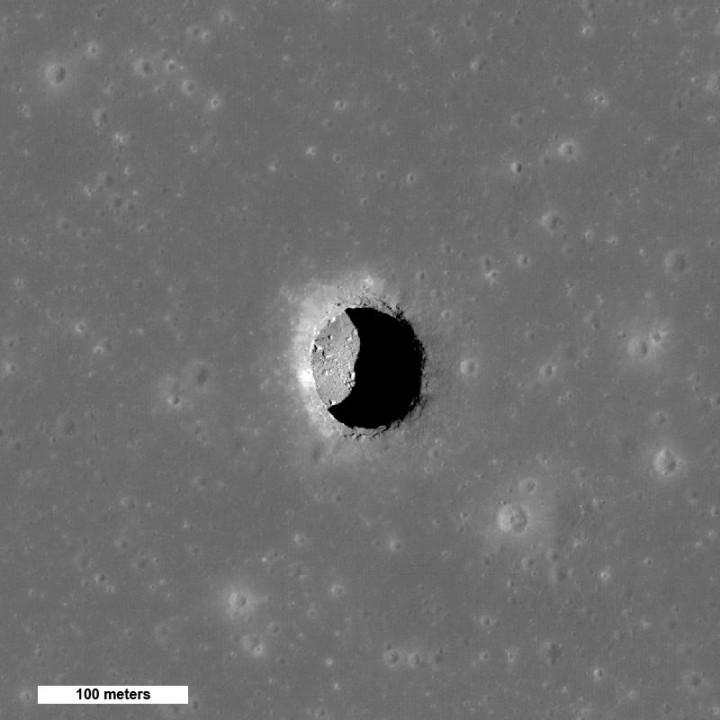
比如科学家指定探测月面上的熔岩管,那就必须具备高精度定点着陆能力。
谈到这,有些网友就不理解了,月球表面到处都是撞击坑,难道着陆器明知指定坐标点有个撞击坑也要硬着头皮落下去吗?
这首先是对高精度定点着陆指标有误解,虽然是定点着陆,但它仍然容许一定范围内的位置偏差,就是100米左右的偏差值。
以嫦娥五号为例,在进行粗避障时移动了101米,在进行精避障时仅移动了7.6米,可以看到其移动距离远远小于该探测器实际上的2.33公里着陆位置偏差距离。

避障任务中横向移动距离通常只有几米,图为嫦娥三号末段精确避障。
也就是说,着陆位置偏差大的问题与机动避障这件事并没有多大的联系。
另外,现今环月遥感卫星的高分辨率成像能力已经达到0.5米至0.3米,在实施登月任务之前的着陆区遴选阶段,就可以避开绝大多数的撞击坑。别说是大型撞击坑,就是小型撞击坑也能识别。
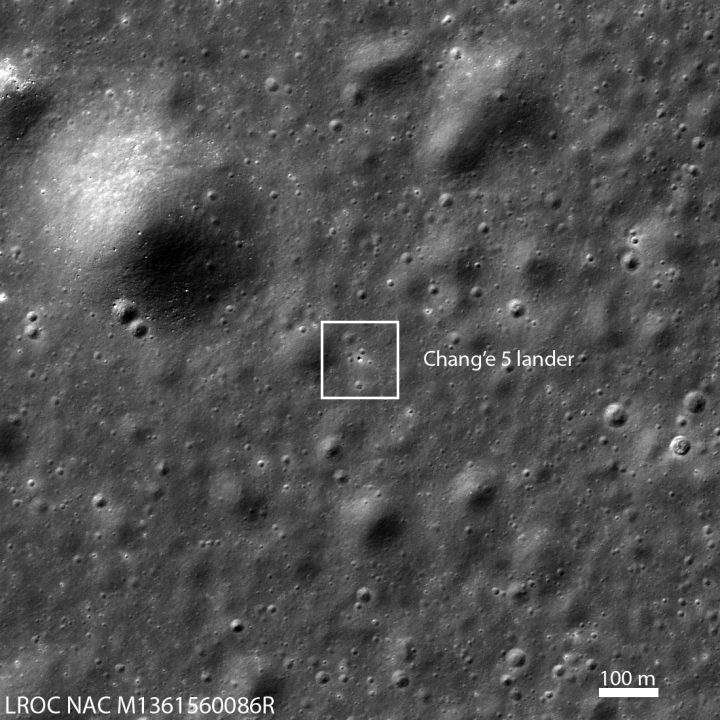
NASA环月卫星连嫦娥五号都能拍到,与其尺寸相当的撞击坑自然也不在话下,我国嫦娥七号也可具备此能力。
从嫦娥三号到嫦娥六号,用的都是同款着陆技术,着陆位置偏差却从600米不断扩散到16.7公里,这是为什么呢?
按照工程总体给出的指标要求,嫦娥系列着陆器的着陆位置偏差最大值是6公里。嫦娥三号选择的是开阔平坦区域着陆,测距测速数据相对准确,因此保持着目前嫦娥系列着陆任务的最高精度(约600米)。
嫦娥四号虽然是嫦娥三号的备份,各项指标状态趋于一致,但它登陆的是月球背面复杂地形,为了防止地形起伏高差带来的测距数据剧烈跳跃,在整个主减速段只能用惯性导航,而惯性导航随着航程的延伸,积累误差会扩大,所以嫦娥四号着陆偏差比嫦娥三号大(千米量级)。

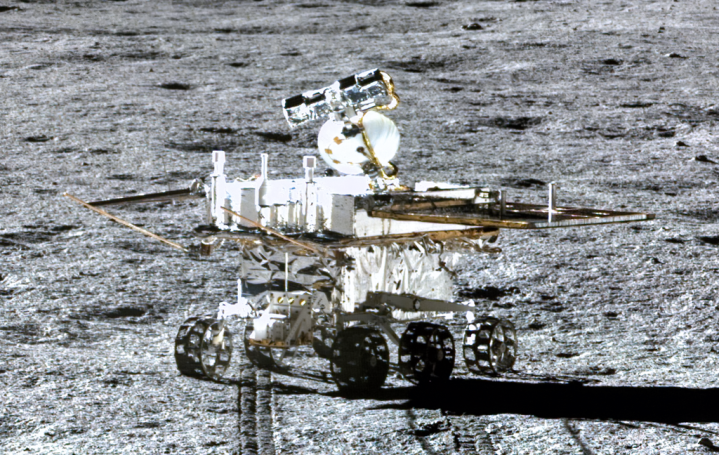
玉兔二号月球车拍摄嫦娥四号着陆器
因为地形干扰,嫦娥四号在转为垂直姿态前几乎不启用测距数据。华体会体育
“嫦娥五号与嫦娥六号的着陆偏差”相较于“嫦娥三号与嫦娥四号的着陆偏差”明显是成倍扩大,这又是为什么呢?
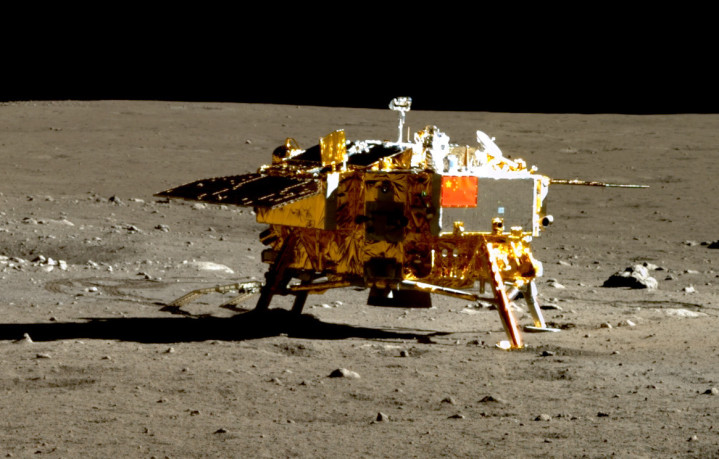
以嫦娥五号为例,它与嫦娥三号一样,选择都是月球正面开阔平坦区域着陆,但也有不同点,嫦娥五号登月部分是着陆器与上升器组合体,整体重量更大,更关键的是着陆弹道有很大的不同。
嫦娥三号的着陆准备轨道是近月点15公里、远月点100公里,嫦娥五号的着陆准备轨道则是近月点15公里、远月点200公里,二者虽然都是从近月点15公里处开始登月下降,但远月点更高的嫦娥五号的下降航程更长,从下降用时的差异就可以感知这一点,嫦娥五号着陆过程用时833秒,嫦娥三号着陆过程用时则是720秒,前者比后者多了将近两分钟。
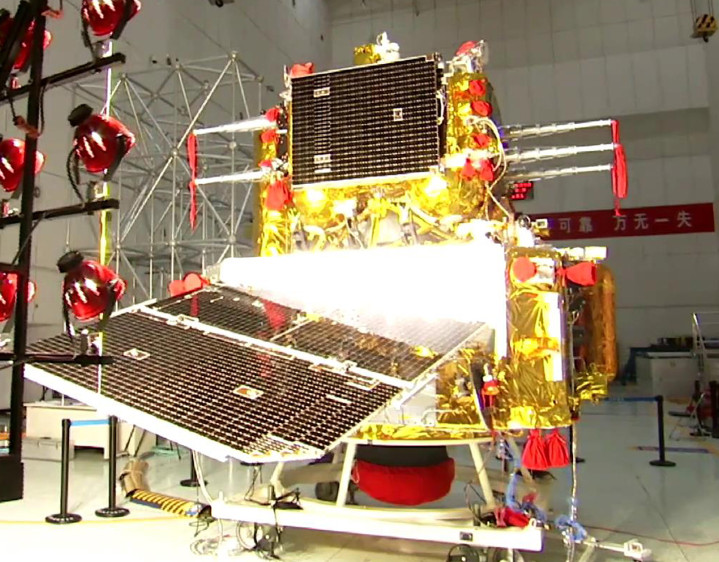
嫦娥五号的着陆器与上升器组合体
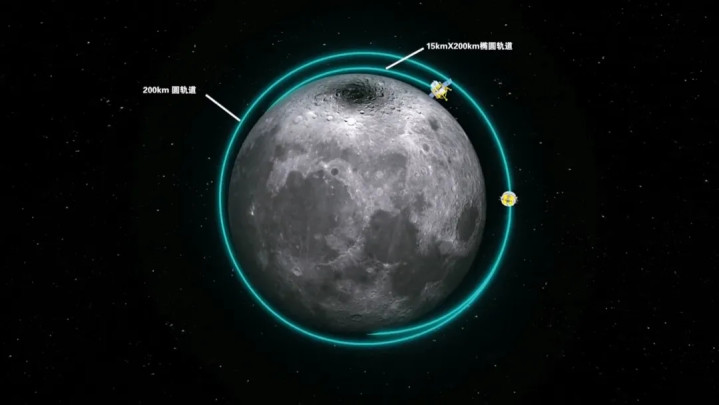
嫦娥五号、嫦娥六号的着陆准备轨道远月点均比嫦娥三号、嫦娥四号更高
嫦娥五号着陆用时更长,着陆航程也会更长,而着陆航程越长,弹道积累误差就越大,着陆位置偏差自然就更大。
嫦娥六号与嫦娥五号的技术状态是一致的,为什么前者的偏差再次放大数倍?因为嫦娥六号登陆的又是月球背面复杂地形,与嫦娥四号一样,惯性导航的积累误差影响又来了,着陆位置偏差自然就再次放大。
可以说,嫦娥系列着陆器皆以嫦娥三号为标杆,同时伴随着登月任务复杂性的提升,着陆位置偏差数据也会随之放大。
为什么嫦娥系列着陆器的登月位置偏差数据不如印度与日本的探测器?
以我国嫦娥六号与印度月船三号为例,前者偏差16.7公里,后者偏差约360米,二者相差约46倍,用悬殊一词来形容也是恰当的。这究竟是为什么?
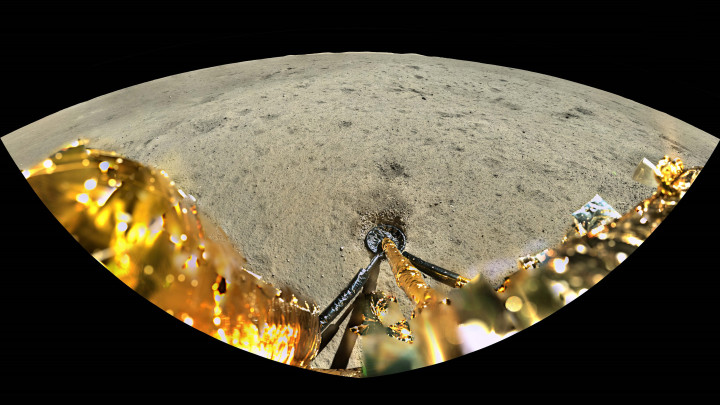
嫦娥六号着陆器全景相机在表取采样前拍摄的月面画面
在人类21世纪的探月大潮中,中国毫无疑问是领头雁,也是当今世界唯一拥有“绕落巡+采样返回”全套探月工程技术的国家。放眼全球,能制造出嫦娥五号、嫦娥六号这种具备月球采样返回能力探测器的国家,截至目前有且只有一家,就是中国。
拥有全套探月工程技术的中国航天是综合能力最优的优等生,但这并不意味着就没有短板。
印度月船三号就好比是一个偏科生,其从一开始就在定点着陆技术上着墨更多,与之相似的还有日本,该国SLIM探月智能着陆器的一个核心使命也是突破定点着陆技术。

印度月船三号着陆器释放的月球车
月船三号着陆器在月面进行起飞测试
印度与日本虽然都是偏科生,但明显日本更加偏科。
印度在吸取月船二号登月任务失败的教训后,月船三号加强了地面试验,针对发现的问题做了大量的升级改良设计,最终实现360米小范围偏差的月面软着陆。
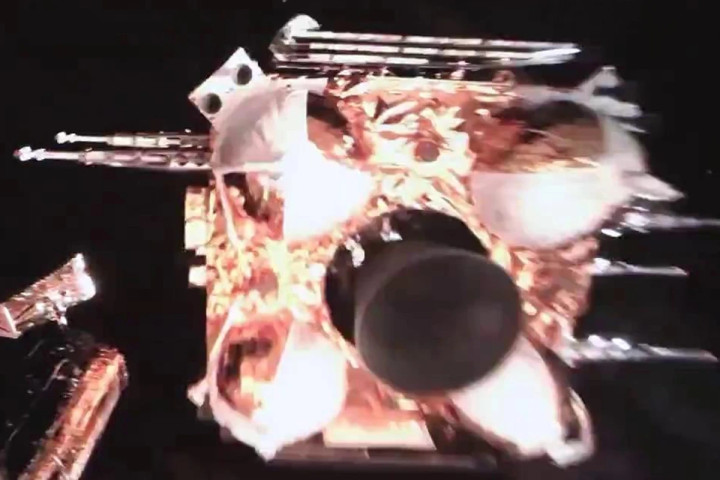
反观日本,SLIM着陆器在距月面几十米的高度发动机喷管直接喷掉至月面,动力可靠性太低,在此之前的人类探月史上还从未有过此类案例。
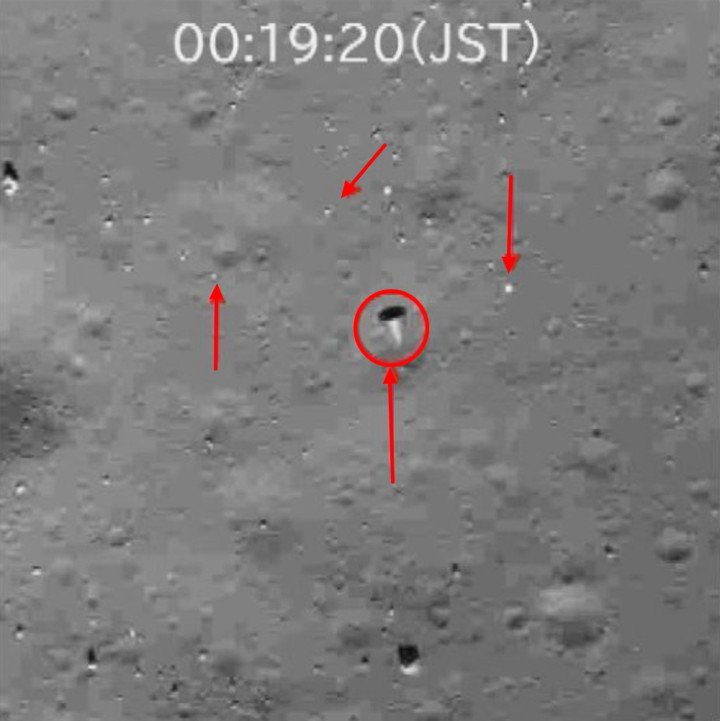
SLIM着陆器掉落月面的发动机喷管
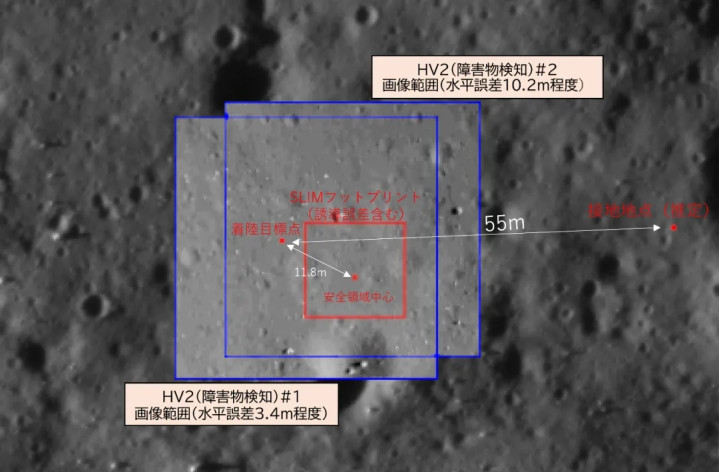
不过,就是在这种极端工况条件下,日本SLIM探月智能智能着陆器还是实现了100米范围内的高精度定点落月,落点偏差仅55米,如果不是发动机故障,它其实已经瞄准落点偏差仅11.8米的着陆位置。虽然是倒栽葱姿态落月,但着陆器依然成功释放了两台月面移动探测装置,着陆器本体也存活了几个月昼周期。
印度月船三号与日本SLIM探月智能着陆器是如何实现高精度定点着陆的?
功能实现的逻辑其实并不复杂,就是应用了“基于图像匹配的地形相对导航技术”。着陆器在下降过程中拍摄航迹下方的月面,并将成像图像与预先存储的高分辨率环月遥感卫星图进行比对,从而解算出位置偏差,反推发动机就可以根据偏差数据调节推力,从而修正弹道,在着陆末段也应用了与嫦娥系列着陆器类似的机器视觉技术进行避障,从而实现高精度落月。
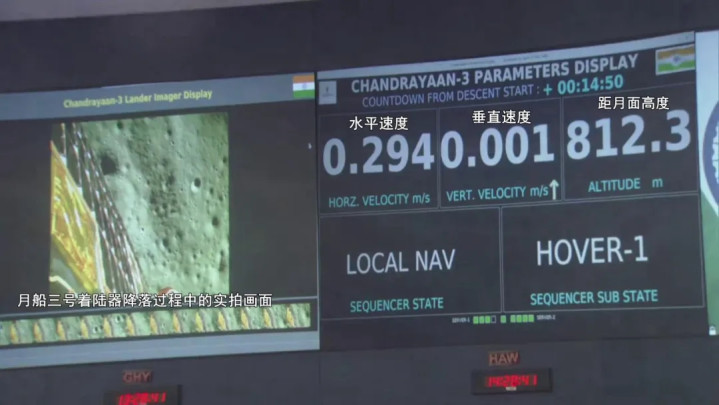
印度月船三号在距月面812米处首次悬停,使用图像匹配地形相对导航进行着陆轨迹修正。
嫦娥系列着陆器的登月位置偏差大,究竟差在哪里?
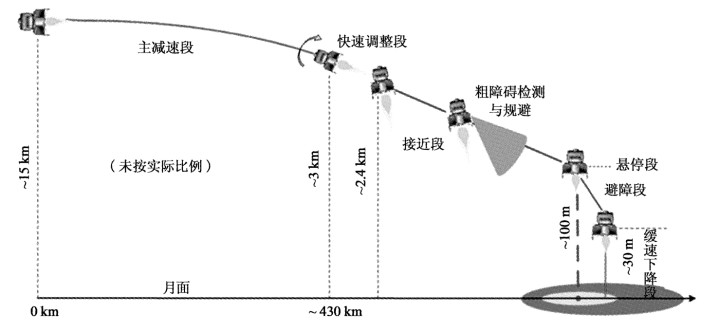
嫦娥系列着陆器整个登月航程可以划分为7个阶段,分别是:
1.主减速段:通过反推发动机满推力运行大幅消减下降速度;
嫦娥六号着陆器与上升器组合体主减速段遥测动画画面
2.快速调整段:在极短时间内使探测器姿态由水平方向开始朝垂直下降姿态调整,同时发动机推力降低;

3.接近段,探测器朝目标着陆区域飞行,期间会进行第一次避障,就是粗避障,主要是避开较大的撞击坑、沟壑等障碍地形;

嫦娥六号着上组合体接近段遥测画面,此时姿态已经趋近于垂直。
4.悬停段:距月面100米时,探测器开始悬停,悬停期间对着陆器下方2500平方米月面区域进行高精度三维立体成像,精细识别障碍物,第二次也是最终选定安全着陆区,这是一块10米乘10米的安全落点区域;
5.避障段:探测器瞄准目标着陆点一边避障一边下降;
6.缓速下降段:距月面30米高度时,探测器来到目标着陆点正上方,然后开始缓速下降;
7.着陆缓冲段:距月面3米高度时关闭发动机,探测器以自由落体形式落月,最后的着陆冲击能量由着陆腿吸收。
缓速下降段与着陆缓冲段遥测动画
影响探测器能否高精度定点着陆的因素不在最后的避障飞行阶段,而是登月之前的着陆准备轨道是否与着陆点处于同一轨道面,稍有偏差就会失之毫厘差以千里,然后就是主减速段发动机推力数据的偏差,会造成下降弹道误差,航程越长积累误差越大。
举个例子,这就好比是狙击手进行远程精确射击,首先要能瞄准靶心,然后要估算出子弹出膛后影响弹道的各种不利干扰数据。对照登月任务,进入精确的着陆准备轨道就是瞄准靶心,下降飞行过程中也有各种影响弹道准确性的不利干扰。
“着陆准备轨道偏差”与“主减速段下降弹道偏差”往往是客观存在的,高精度定点登月就是要想办法修正偏差。
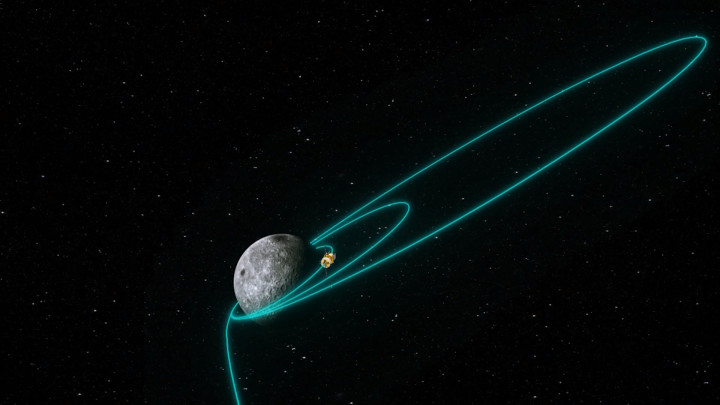
以正在执行任务的嫦娥六号为例,它和嫦娥四号一样,主要是在着陆准备轨道的轨道面修正上想办法,嫦娥六号是通过3次近月制动进入目标环月轨道,其中前两次是进入不同时间周期的椭圆轨道,它就是根据椭圆轨道的特性进行轨道面修正,从而确保了较高的着陆准备轨道精度。
但是,只修正着陆准备轨道面的偏差是不够的,因为接下来的主减速段的推力偏差同样会导致着陆偏差。
在实施登月任务之前笔者就预测嫦娥六号可能会采用与嫦娥四号相似的着陆方案,即为了避免地形起伏高差影响测距修正,在整个主减速段不引入测距修正,只用惯性导航,而惯性导航积累误差较大,为了确保安全,主减速段结束时的高度要足够高,以免撞山。
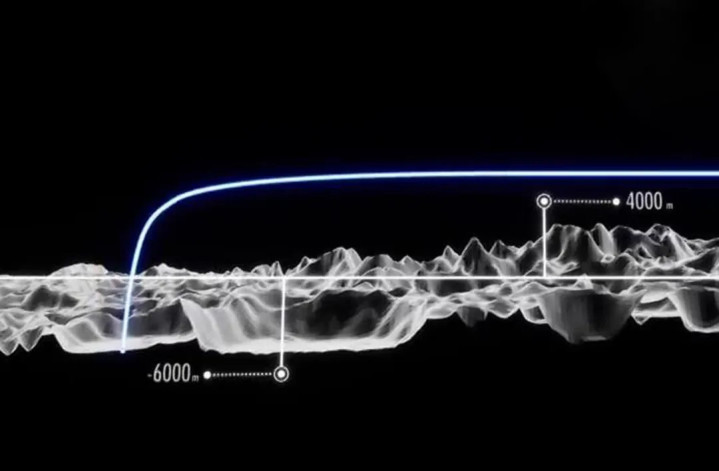
嫦娥四号是在八千多米的高度结束主减速段,六千多米高度转为垂直下降,此时再引入测距修正,就没有地形起伏高差带来的数据跳跃难题,因为此时探测器已经来到了目标着陆区上空,测距载荷可以直视目标着陆区。
但是,嫦娥六号登月成功后某单位发布了报道通稿,里面提到嫦娥六号是在距月面3公里高度转垂直下降。华体官网注册
十年前的嫦娥三号是从3公里高度开始朝垂直姿态调姿
当时笔者就有疑惑,3公里高度转垂直下降这是嫦娥三号的标准动作,但这里可是复杂地形的月球背面,如果刻舟求剑,那么是如何避免地形起伏高差带来的测距数据剧烈跳跃的影响?
嫦娥六号如果是从3公里高度转垂直下降,而又没有采用嫦娥四号的办法,那只能说明我们的科研人员又实现了重大创新。
结果,笔者在看央视报道的时候得知,嫦娥六号是在距离月面1.2万米的高度结束主减速段,这就印证了我此前的预测,为了避免地形起伏高差带来的测距数据跳跃难题,嫦娥六号的确是用到了与嫦娥四号任务相同的办法。
嫦娥六号在距月面1.2万米高度转向垂直下降
出乎我预料的是,嫦娥六号结束主减速段时的高度比嫦娥四号8000多米还要高,这也说明此次登陆航迹下方的月面地形更加复杂,这一点从公开的登月实拍视频画面中也能感知到。
主减速段是造成下降弹道偏差的主要阶段,因为航程占比最大,因此要想高精度登月,就要在结束主减速段后想办法修正弹道。
嫦娥六号主减速段实拍画面
此时就需要类似印度与日本应用的基于图像匹配的地形相对导航技术,比如嫦娥六号原本就会在1500米高度使用光学成像敏感器对月面成像进行第一次粗避障,此时如果用图像匹配技术,就可以在较高的高度瞄准标称着陆点进行弹道修正。
而且高度越高修正弹道的能力越强,高度越低就越弱,比如距离月面只有100米时再去修正就晚了,不可能指望着陆器横向移动几公里乃至十几公里,因为没有那么多燃料,到了末段最大的横向移动范围也就是最多几十米的量级。
通过梳理可知,要想补齐这最后的短板,就需要引入基于图像匹配的地形相对导航技术。我们为什么没有用这项技术?
日本SLIM探月智能着陆器的基于图像匹配的地形相对导航技术
这是因为嫦娥系列着陆器当前的着陆位置偏差控制水平能够满足当前任务的技术需求,任何事物都有主要矛盾与次要矛盾,具体到嫦娥系列登月任务中也要抓大放小。从嫦娥三号到嫦娥六号的主要矛盾就是确保着陆器的成功落月,唯有成功才是通往可持续发展道路的秘钥。
比如日本与印度航天,他们集中力量钻研定点着陆这一项技术,收获了什么?任尔东西南北风,现今在月球表面活跃的探测器仍然只有中国一家的嫦娥三号着陆器、嫦娥四号着陆器、玉兔二号月球车、嫦娥六号,这些探测器源源不断地将月球探测数据、月球样本回传地球,这就是可持续发展。
没有用图像匹配导航并不代表我们做不到,对于中国航天而言,只是选择何时去做的问题。
早在十年前,在我们已经取得嫦娥三号任务成功的背景下,科研人员就嫦娥三号的备份探测器的用途展开了讨论。
吴伟仁院士披露当时主要有三个选择:
第一个选择:不发射备份探测器;
第二个选择:再在月球正面找一个地方落下去;
第三个选择:到月球背面去。
在进行第二个选择讨论时,有科研人员甚至建议备份探测器降落在嫦娥三号旁边,这样也能显示我们的水平,控制精度很高,这就是高精度定点着陆。
以嫦娥三号的登月位置偏差精度水平显然难以做到高精度定点着陆,既然当时我们有这个选择的能力,就意味着当时如果我们选择这个方案,早在十年前我们就可以实现若干年后日本印度才实现的基于图像匹配地形相对导航的高精度定点着陆技术。
但是,我们考虑到重复降落在嫦娥三号已经登陆的着陆区不会带来更多的科学探测信息,也就是说科研价值不大,因此就放弃了在十年前突破定点着陆技术的选项。

嫦娥三号着陆器
于是,我们决定去月球背面,这就是嫦娥四号任务,此选项是既有工程价值,也有更大的科学价值。降落月背意味着我们要征服复杂月面地形登陆的工程难题,在科学价值方面,这是人类首个月球背面软着陆探测器,可以获取更多未知的知识。
嫦娥四号的实践表明,它没有辜负科研人员们的期望,稳定运行五年多时间,至今仍处于工况良好的状态,嫦娥四号着陆器与玉兔二号月球车的寿命之长甚至都快把服务他们哥俩的鹊桥号中继卫星熬到寿终正寝,在未来的岁月里目前正在环月大椭圆轨道上的鹊桥二号中继卫星将接棒鹊桥号服务包括嫦娥四号在内的一系列月面探测器。
玉兔二号月球车与鹊桥号中继卫星通信
至于定点着陆这个现存的技术短板,我们将在两年时间内补齐,两年后发射的嫦娥七号就将具备高精度定点着陆能力,着陆范围偏差可控制在100米以内。
对于嫦娥七号任务而言,高精度定点着陆技术是刚需技术,因为它需要降落在月球南极区域,在那里不仅有更为复杂的月面地形,同时还有光照角度的快速变化导致的阴影区与光照区的快速变化,我们还要求嫦娥七号降落在距离永远阴影区不远的光照区,以便于飞跃探测器进入其中直接探查水冰资源,多种因素制约,使得可供选择的着陆区更为狭小,因此需要嫦娥七号降落在指定坐标点位附近。华体体育登录
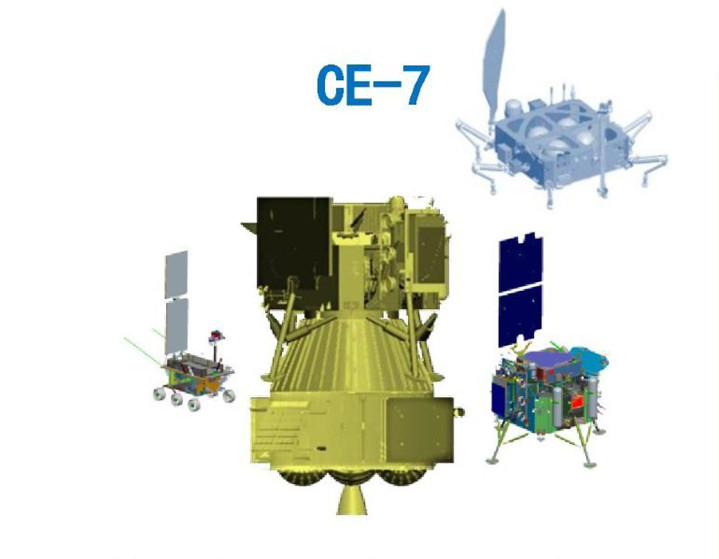
嫦娥七号
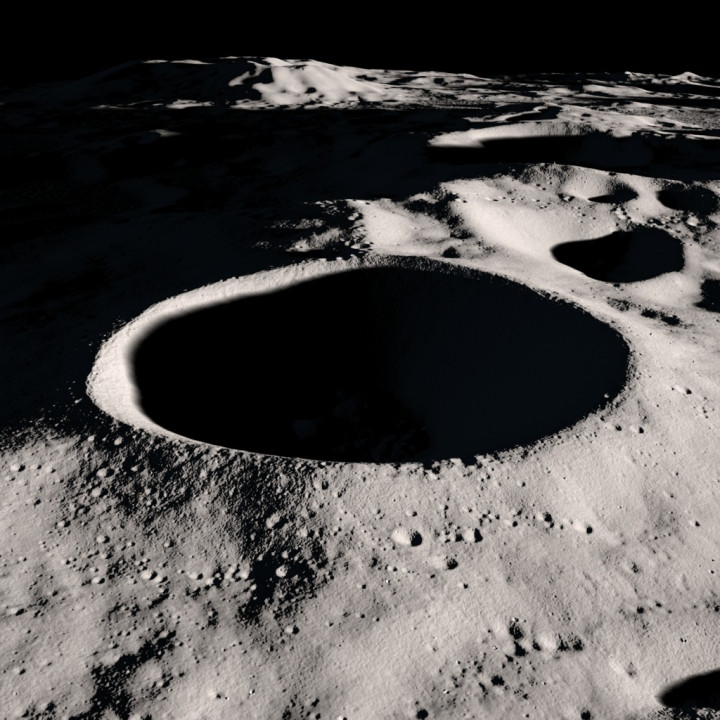
月球南极区域连续光照区与永久阴影区相伴而生
依稀记得五年前当嫦娥四号稳稳地降落在月球背面冯·卡门撞击坑内时,航天系统是这样定义此次任务的工程价值的:这标志着我们具备了根据科学探测需求在月球表面任意选择着陆区的全月面到达能力。
对标嫦娥四号,结合嫦娥六号的新使命,笔者认为可以这样重新定义我们的能力:嫦娥六号任务的实施标志着,我们具备了根据科学探测需求在月球表面任意选择采样区的全月面取样返回能力。

嫦娥六号钻取采样


嫦娥六号月面表取采样
嫦娥六号上升器月面起飞
两年后,嫦娥七号任务的实施将意味着,我们将具备根据科学探测需求,在月球表面任意选择着陆点位的高精度全月面到达能力。
从“任意选择着陆区”到“任意选择着陆点”,一字之差的背后是探月工程实力的大幅跃升,与嫦娥七号并行推进的探月任务还有嫦娥八号与载人登月,一幅波澜壮阔的探月图景已经呈现在我们面前。
我国是世界上最早倡议建设地月空间经济圈的国家,我们当然不只是说说,倡议的背后依托的是探月硬实力。
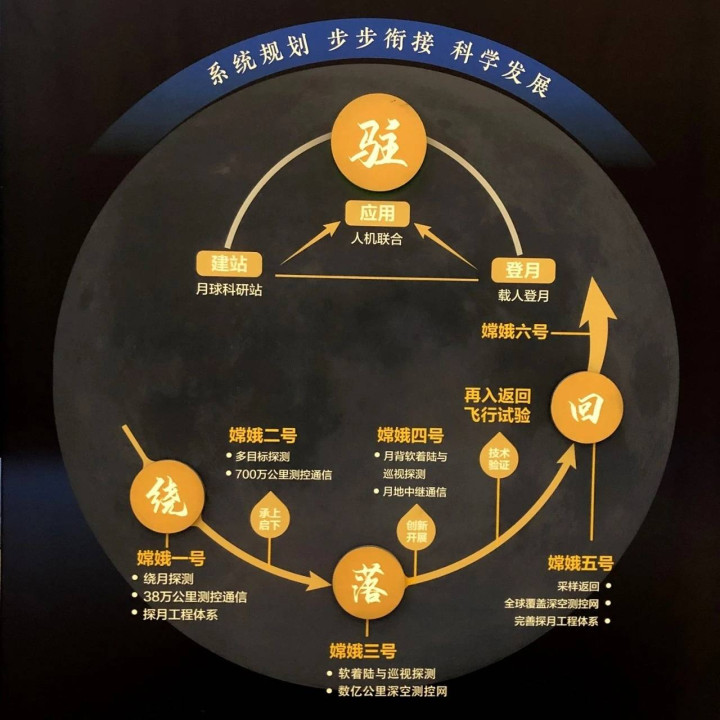
嫦娥探月工程立项伊始确立了绕落回三步走规划,而这三步是从属于更宏伟的“探登驻”大三步规划,待载人登月工程实施后,我们将具备载人地月空间往返能力,再随着由我国主导的月球科研站工程建设的推进,接下来我们将朝着终极目标“驻月”推进。
与“探登驻”三步走并行推进的还有“勘建用”三步走,可以预见,通过几代人的努力,利用月球资源开发地球的这个梦想必将率先在中国人手里成为现实。
华体APP入口


 卤菜基础类
卤菜基础类











 13126523202
13126523202 广东省广州市和田经济开发区1254号
广东省广州市和田经济开发区1254号


